在国家自然科学基金委项目(21125316,21434009,51335010)、“973”项目(2013CB632300)和中科院重点部署项目(KJZD-EW-M01)资助下,海洋之神8590vip兰州化学物理研究所固体润滑国家重点实验室材料的表面与界面课题组在界面摩擦调控方面取得系列进展。
软物质界面摩擦大多存在于生物体之中,一般都具有极低的摩擦系数。但这些软物质界面之间的摩擦大都是“被动”摩擦,其摩擦系数不能“主动”调控。受此启发,科研人员通过分子设计将一些响应性分子结构引入材料基体中,制备出了多种响应性软物质材料。通过施加外界刺激实现材料表界面处分子构象转变,从而实现材料界面摩擦调控。
研究人员首先制备了一系列温敏性水凝胶,实现了凝胶表面摩擦系数的温度可逆调控(Macromol. Rapid Commun., 2013, 34, 1785-1790),然后在此种体系中引入酸碱敏感组分制备出温度-pH双刺激敏感凝胶体系。这种材料表面不仅具有超低摩擦系数,而且在连续改变测试温度和环境pH条件下可以实现摩擦系数从超低(~0.05)到中等(~0.1)再到较高(>1)的连续可逆调控(NPG Asia Mater.,2014, 6, e136; DOI:10.1038/am.2014.82)。研究人员还制备出了一系列温敏性的微凝胶体系并对其加以改性修饰,赋予该体系新的功能。通过在该体系中引入苯并三氮唑基团解决了微凝胶水溶液在摩擦副表面的腐蚀问题(ACS Appl. Mater. Interfaces, 2013, 5, 10842−10852),在微凝胶表面引入亲水性聚合物刷赋予该体系更低的摩擦系数(~0.005),研究工作还实现了对消炎药物的可控释放,因而使该类材料有望成为目前可注射关节润滑液的替代品(ACS Appl. Mater. Interfaces, 2014, DOI: 10.1021/am506026e)。
受关节软骨表面刷型生物大分子结构启发,该课题组成员还在固体表面接枝离子型聚合物刷,通过聚合物刷大分子与溶液中“对离子”之间相互作用,实现了固体表面摩擦系数从极低到极高的“对离子”调控(Macromolecules, 2013, 46, 9368–9379)。同时还可以在惰性的类金刚石(DLC)薄膜表面接枝离子型聚合物赋予此种生物材料超低摩擦系数(Adv. Mater. Interf., 2014, DOI: 10.1002/admi.201400035)。将聚合物刷接枝到中空二氧化硅纳米粒子表面,赋予该材料较好的摩擦性能和药物缓释性能(J. Phys. Chem. B, 2014, 118 , 4920–4931)。受壁虎脚刚毛启发,该组成员制备出了“类壁虎脚”结构的硅纳米线,同时对其修饰,实现该表面对湿度、酸碱等刺激的摩擦调控,因为传统壁虎脚粘附-脱粘附基于物理和机械的原理,该工作提出了化学调控摩擦与粘附的壁虎脚概念(Small, 2014, DOI: 10.1002/smll. 201402484)。
流体流经固体表面存在摩擦阻力。由于超疏水/疏油表面与液体之间微气泡的存在,超疏水表面与亲水表面相比具有较低的摩擦阻力。该组成员首先研究了多种油品在疏油表面减阻行为,并总结出其减阻行为的一般规律( J. Colloid Interf. Sci. 2014, 414, 9-13)。随后,在此疏油表面接枝亲水性聚合物刷,通过调节聚合物刷的接枝密度和分子构象实现此表面与液滴之间的粘附力控制,进而实现固-液界面减阻行为的调控(J. Phys. Chem. C, 2014, 118 , 2564–2569)。基于以上原理研究人员同样实现了界面减阻行为的pH调控(Langmuir, 2014, 30 , 6463–6468)和光调控(Soft Matter, 2014,10, 5318-5324)。
基于上述研究工作,受Adv. Mater. Interf.期刊邀请,该课题组撰写了题为Interfacial Friction Control 的综述(Adv. Mater. Interf. DOI: 10.1002/ admi.201400392)。该综述全面总结了近年来国内外研究人员在界面摩擦控制方面的进展;对当前研究工作提出了存在的问题及解决方法,并对今后界面摩擦控制方向做出了展望。
以上工作由周峰研究员和刘维民院士课题组及魏强兵博士,博士生吴杨、刘国强、麻栓红等完成。
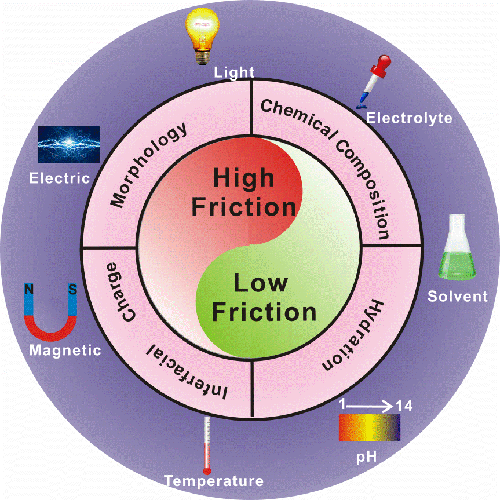
外界刺激调控界面摩擦示意图
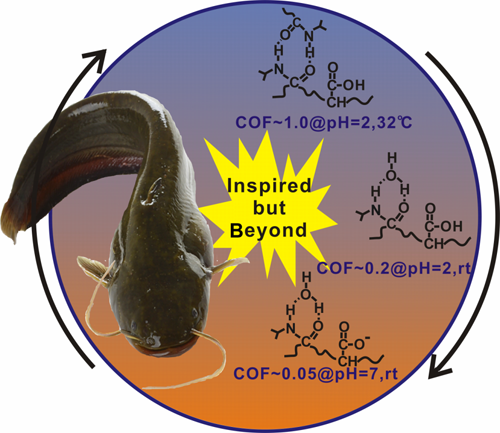
仿生鱼皮表面摩擦调控

 联系我们
联系我们